The 6 Main Types of World Map Projections
Maps have been around for more than 5,000 years. The ancient process of cartography laid the foundations of maps, art, and science. Maps can come in many forms. Political maps show political features such as states, country borders, capitals, and city locations. Political maps are designed to show countries in separate colors for easy identification on a globe. Vegetational Physical maps are a type of map that shows land terrain along with the types of vegetation that occupy particular regions across the world. Replogle’s physical globe shows natural vegetational features of the deserts, tropics, grasslands, forests, Tundra, and ice caps. Political and vegetational maps are very popular and are used in a variety of map projections.
Main Types of World Map Projections

The Mercator is the most popular conformal map projection. The Mercator map projection was created by Gerardus Mercator in 1594. It showed meridians as equally spaced lines. The projection is used for a variety of navigational plotting of ship routes. Mercator maps are considered the simplest and easiest of wall maps to show locations and distances between latitude and longitude lines.
Robinson
The Robinson map projection was created by Arthur H. Robinson in 1963. One of the main strong points of a Robinson map is its ability to show an accurate representation of land shapes and locations with minimal distortion in the center of the map. Robinson’s projection uses curved lines for longitude and parallels straight lines for latitude like in the wall map from Replogle.
Goode’s Homolosine
Goode’s homolosine map projection was developed by John Paul Goode in 1925. One of the main key features of a Goode homolosine projection is its ability to minimize distortion for the entire world. Continents shown on Goode’s Homolosine maps are proportionally sized correctly to each other. One main disadvantage of this type of projection is its use of distances, directions, and angles, which are not accurately shown, because of distortions.
Winkel Tripel
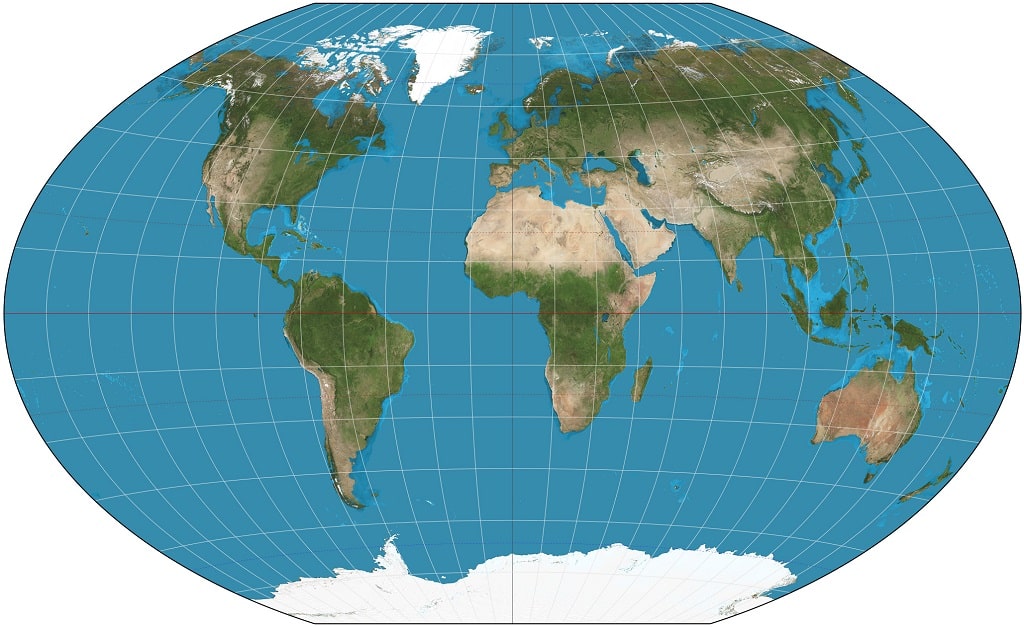
Winkel Tripel projection was developed by Oswald Winkel in 1921. One primary use of this type of projection is that it shows continents and countries with very little distortions and, as a result, the land masses are very accurately shown on maps with very good detail.
Polar Projection
Polar projection is primarily used to show the north or south polar regions of the Arctic and Antarctica. A polar projection is a type of azimuthal projection. This type of projection shows the true areas and shapes of countries and continents, with very little distortion.
AuthaGraph
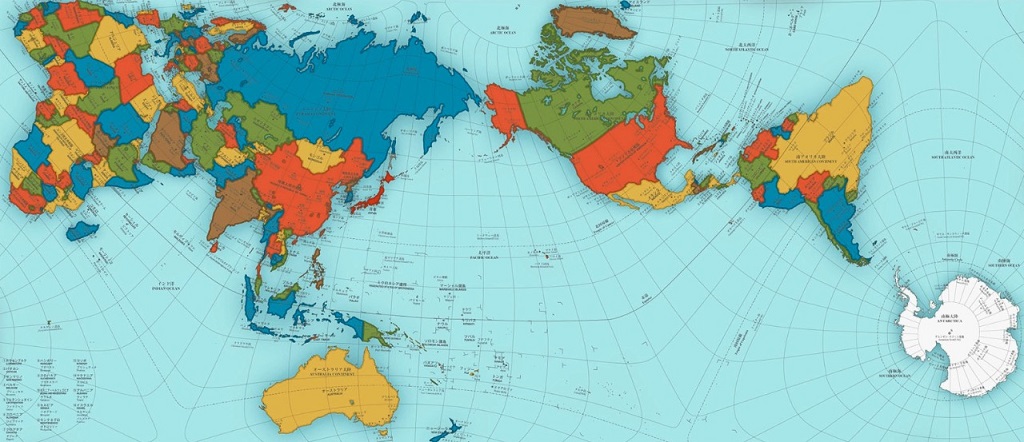
The AuthaGraphy projection was created by Japanese architect Hajime Narukawa in 1999. It is considered the most accurate projection in the mapping world for its way of showing relative areas of landmasses and oceans with very little distortion of shapes. One key feature of an AuthaGraph projection is its way of showing the Earth with no dead ends or ending points. This results in very unique map views from a variety of angles.
Conclusion
We at Replogle Globe take into account many aspects of the various projections when developing our globes and maps. It is with great care and precision that we determine the most accurate world map projection for a particular project before moving forward. Because of this attention to detail, we are proud to introduce amongst the most accurate and up-to-date globes on the market. Contact us!